會出現系列故障,導致電動機出現問題,影響電力系統穩定生產,甚至會導致事故發生。因此,研究電力系統中電動機智能保護系統,是降低電動機故障發生的有效措施,文章對電動機智能保護系統的硬件 DSP 及網絡軟件設計深入分析, 旨在為實際電力系統中應用電動機智能保護系統提供有力參考。
熱繼電器(如圖1所示)是20世紀50年代由蘇聯引進的金屬片機械式電動機保護設備,該設備能夠實現對電動機過載運行合理保護,自身具有反時限性,結構簡便。但是該設備自身功能具有單性,熱繼電器自身特熱量時間常數小,對于些特殊電動機(大慣量、重載起動)不能適用,容易出現堵轉保護現象。

圖 1 德力西 JR36-20 熱繼電器示意圖
1.2 電子式電動機保護裝置
在電子技術成熟的工業時代,以電子模擬為支持的多功能保護裝置替代了機械式雙金屬熱繼電器保護。電子式電動機發展已久,開始為晶體管支持下的電子式電動機,后發展到以集成電路為支持,可滿足低壓電動機保護需求的功能性電子式電動機。當今時代背景下,電子式電動機保護裝置已經不單單是保護取樣,其更多的在于電壓取樣及電流取樣兩種形式。
1.3 微機型電動機保護裝置
微機型電動機保護裝置技術是在微機技術及計算機技術zhi持下,將電動機機電控制向自動化智能控制過渡體現。將集成電路融入到微型處理器及DSP芯片中,可以實現高效率的信號處理及通訊工作。智能化保護裝置以綜合保護裝置為支持,可以實現對電機的斷相、過載、短路、欠壓、三相不平衡、堵轉、漏電等監測及控制。此外,這種微機型電動機保護裝置能夠和不同的傳感器配合工作,對電動機實現在線檢測,對電動機存在故障或早期故障判斷并保護,實現遠程檢測和智能控制。在保護裝置和遠程計算機數據交互后,其自身實現遙感、遙控功能,儲存大量實時數據,同時提高控制系統自動化水平。
2 電力系統電動機智能保護內容
2.1 短路
短路保護應遵從相敏保護原則,將起動電流及短路電流區分恰當,確保系統保護的可行性。例如,在鼠籠式三相異步電動機保護上,其額定功率為工作電流5倍。電磁保護裝置中,要脫離起動電流工作,若電動機容量大,起動電流將會接近電動機短路電流。不能單純分析電流輻射值,避免不合理判斷引起拒動或誤動現象。在電動機啟動時,功率因數較小,線路短路后,電感效應較低,相應功率因數較大。
2.2 過載
過載保護中,應遵循自適應反時限保護,以規范操作獲取β(過載倍數),根據電動機容許過載時間(t),以:
t=1500ln(β2-α) (1)
通過此公式計算實際允許過載時間量,在考慮到實際允許過載時間量的同時,還要考慮到熱積累的升溫問題,以
t2=β22/β12xt1(t1-△t) (2)
以上述公式,計算允許過載時間,以強化對電動機過載保護,實現冷態及熱態積分,從而達到應用長時間電動機冷態特征的目的。
2.3 斷相
實際的斷相保護中,其短路則存在正序電流分量和負序電流分量。設計可利用這勢,使故障發生可形成對電流的充分保護,設計科學保護裝置。保護裝置中,可以反映故障分量,實現對故障整定值的簡化選擇,提高裝置的整體整體靈活性。傳統負序保護其主要是應用負序電流過濾器,以此獲取信號信息,傳統負序保護輸入和負序電流有必要聯xi。若采用傳統負序保護,則需應用硬件濾序器,其硬件設備上成本消耗多大,參數調試復雜,可行性較差。應以智能化保護裝置為支持,以交流采樣為的主要方式,獲取瞬時值,進而對采樣頻率、負序分量等內容進行化處理,確保系統穩定。
2.4 電壓
電壓保護上,其分為失壓保護、欠壓保護及過壓保護等。對于過壓保護及欠壓保護,在定延時后,單片機將發出跳閘命令,過壓及欠壓干擾。若電源電壓消失,則電力系統電動機會發生停車,引起失壓保護。失壓保護下電源恢復正常工作,但是電動機將不再自動開啟或解除閉鎖。電動機開啟之前,應檢測供電線路是否正常。若發現斷相故障,則要以信號方式閉鎖回路,電機不再啟動,同時對故障進行報警,顯示故障。若*,則電動機正常啟動。
3 電力系統中電動機智能保護系統設計
當下我電力系統中存在多種電動機保護措施,但是其實際應用中效果并不理想,電力系統中對電動機控制效果并不理想。保護性設備自身可靠性較差、保護功能單性、特性未完善等問題將導致其通信、界面、速度等不能滿足電力企業需求。因此,要有針對性的對電動機智能保護系統進行研究分析,以此滿足用電用戶需求、電力企業需求。在數字信號處理技術不斷發展的時代背景下,數字信號處理運算效率高,能夠化電力系統電動機智能保系統。要針對單片機、DSP的性價比,合理選擇處理器,對微機保護裝置進行化設計。
3.1 三相異步電動機保護判據
三相異步電機如圖2所示,對其保護,要先找出需保護判據,操作針對現有科研成果進行分析,分析電機保護原理,將其和實際電力系統聯xi起來,了解電動機的工作原理。同時,要確保電動機智能保護系統具有通用性,能夠適用于不同的電力系統當中,確保其保護曲線及保護動作程序和電力規范相吻合,對保護裝置中保護曲線進行定制,根據不同電動機需求進行科學修改。
圖 2 西門子三相異步電機示意圖
3.2 硬件電路設計
硬件電路設計主要以電流電壓互感器、電壓形成電路、采用保持電路等處罰,將不同通道電能轉化為電壓值,將其輸送到DSP中A/D合轉換電路中進行轉換,再根據實際結果和標準值比對,判斷是否存在故障,若存在故障則跳閘并發出報警,記錄事件發生時間、故障性質等,實現對電力系統中電動機合理保護。其主要以DSP系統、前向輸入、開關輸入輸出、人機交互及通信系統組成。
3.2.1 信號預處理設計
將實際搜集的電流的信號,經阻容低通濾波器凈化之后,將信號以運放電路處理為電路允許的弱電壓信號。
3.2.2 DSP電路設計
T1公司的DSP芯片屬于哈佛結構改建,在數據總線及程序總線間局部交叉,數據可在程序存儲器中儲存,被算術運算使用,體現芯片靈活性。可調度兩獨立總線,確保處理能力效率高,減少儲存器讀取指令時間,提高運行速度。TMS320LF2407A數字信號處理器屬于微控制器,具有高集成特點,將高性能DSP內核及微控制器外設功能集中在單片上,實現對MCU(傳統多微處理器)及多片設計的理想替代,將DSP的實時性、高效性處理及外設功能集中起來,使控制系統具備40MIPS/秒的處理速度,以LF2407A DSP控制器實現遠超16位微控制器的工作能力。
該控制器以高效靜態CMOS為支持,使供電電壓降到3.3V,控制器整體消耗較小。40MIPS高速執行速度使指令周期在25ns(40MHz),實時控制穩定。片內有32K字x16位Flash程序處理器,以2.5K字x16位RAM,544字雙端口RAM (DARAM),2K字單口RAM(SARAM)。事件管理上以EVA和EVB為管理模塊,其包括兩個16為定時器(通用),8個16為PWM(脈寬調制)通道,通過設備聯動實現三相反相器控制,脈寬調制及邊緣校正。防治可編程脈寬調制擊穿故障,形成死區控制。設置16通道同步A/D轉換其,在交流異步電動機、無刷直流電動機、步進電動機、多級電動機、開關磁阻電動機等控制上有良好的應用效果。
外圍電路設計上,LF2407A通過外部變壓設備將220V交流電轉化為5V直流電供應,但LF2407A芯片只支持3.3V電壓,在電路設計中要將5V電源轉化為3.3V電壓,為CPU實現供應(采用TPS76833QPWP為轉換芯片,轉換5V電壓為3.3V)。5V電源輸入端以2mm插口設計,電源功率要求在5V、750mA。
微機系統中,未防止系統加電或電源“掉電”故障發生,要合理規劃復位電路及電壓監視電路。以TL7705CP(美德州儀器公司產)集成電路電源電壓監視器組成復位電路,對電源電壓監控。在使用中,TL7705CP以220V電源供電,線路停電保護裝置輸入電壓下降到4.75V(從5V下降)時,系統復位,原高電平變為低電平,并產生外部中斷提醒信號,子程序將DSP內RAM數據及寄存器內容在電源電壓耗盡之前迅速存入非易失性儲存器中,確保數據記錄完整可靠。
外圍電路中配備電源電路、監控電路及時鐘電路,確保DSP電路可靠。
3.2.3 鍵盤顯示電路
鍵盤顯示電路是人機交互的重要內容,需保證其正常反應系統運行狀態及運行參數,發生電動機故障時顯示故障參數及故障類型,以鍵盤將整定值輸入、修改,對歷史故障準確查詢記錄,實現智能化、人性化操作設計。
3.2.4 上位機通信設計
以機械接口、電氣接口、微處理器輸出口連接,實現電動機智能保護及PC機通信結合,實現對設備的遠程操作,操作人員可實現遙控操作,及時通知運行人員設備運行情況。
3.3 軟件程序設計
電動機智能保護系統軟件設計分為主控制模塊及定時器中斷處理設計。
3.3.1 主控模塊設計
主控模塊為主程序,屬系統核心部分,起通過對各個功能性模塊調整,對各個參數進行檢測、分析并判斷,進而實現系列的保護控制實施。下位機上電,自行系統檢測,對CPU、RAM、ROM、A/D等內容自行檢測,若發現硬件存在故障,則停止檢測及時報警,待恰當處理后,進行系統初始化。電動機送電之前,對其漏電檢測,檢測供電線路及電動機是否存在漏電風險,若發現電動機或供電線路存在絕緣性問題,則不予供電,并發出警報。在地絕緣電
阻高于整定電阻時,可對電動機正常供電。
3.3.2 定時器中斷處理模塊設計
定時器中斷處理模塊需對數據采集、處理、判斷故障、執行保護措施等內容,可以網絡為基礎,實現在線檢測電動機狀態。以定時器中斷程序進入,保護現場,對電力系統中電動機電壓、電流采樣分析,計算電動機電壓及電流,判斷其啟動狀態。未啟動,則分析是否有短路、斷相、接地等問題發生,及時采取速斷保護設備。啟動狀態正常,則分析是否存在啟動故障,若無啟動故障,實現啟動保護。
軟件程序設計是以各類編程語言、程序實現保護裝置需實現的功能,以系統自檢、初始化、開關量輸入輸出、A/D采樣、參數計算、電機啟動保護、電機運行保護、相應鍵盤、顯示、CAN總線通訊等模塊構成。不同模塊可獨立工作,各個接口涉及簡單,避免程序冗余造成智能設備工作效率下降,要盡可能縮短程序開發實際周期。
4.安科瑞智能電動機保護器介紹
4.1產品介紹
智能電動機保護器(以下簡稱保護器),采用單片機技術,具有抗干擾能力強、工作穩定可靠、數字化、智能化、網絡化等特點。保護器能對電動機運行過程中出現的過載、斷相、不平衡、欠載、接地/漏電、堵轉、阻塞、外部故障等多種情況進行保護,并設有SOE故障事件記錄功能,方便現場維護人員查找故障原因。適用于煤礦、石化、冶煉、電力、以及民用建筑等領域。本保護器具有RS485遠程通訊接口,DC4-20mA模擬量輸出,方便與PLC、PC等控制機組成網絡系統。實現電動機運行的遠程監控。
4.2技術參數
4.2.1數字式電動機保護器
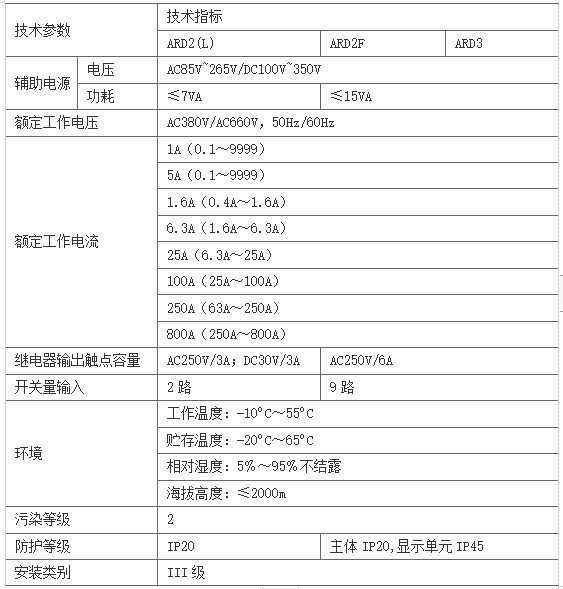
4.2.2模塊式電動機保護器

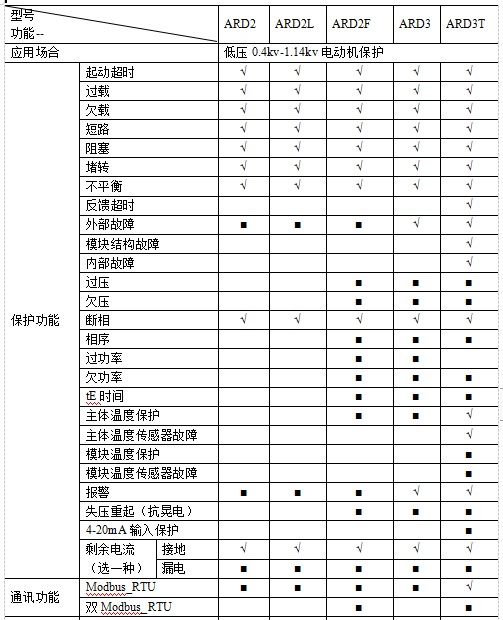
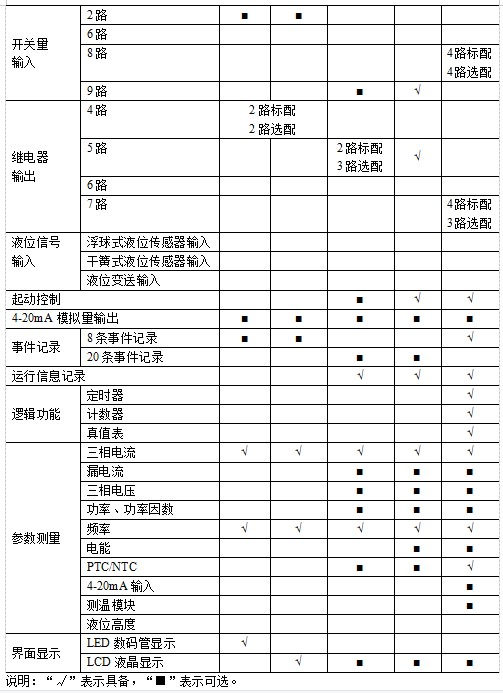
4.3產品選型
5.結束語
綜上所述,對電力系統中電動機智能保護系統的分析,要了解電動機保護系統發展及現狀,了解電力系統電動機智能保護內容,再次基礎上分析電力系統中電動機智能保護系統設計內容。當下電力系統持續發展中,應重視對電動機的保護,針對異步電動機實施智能化保護。通過應用DSP數字保護系統及計算機網絡技術,實現高校的信號處理,以集成電路為支持,提高保護裝置計算能力,進而實現對電動機故障的迅速參照和處理,確保電動機穩定工作,促進我電力企業可持續發展。
參考文獻
[1]馮星輝, 張修太 ,翟亞芳.智能型低壓電動機保護裝置的研究與設計 [J]. 電子器件 ,2015(3),P671-675.
[2]張 倩.電力系統中電動機智能保護系統探索
[3]安科瑞企業微電網設計與應用手冊.2020.06版
作者簡介:劉細鳳,女,安科瑞電氣股份有限公司,主要研究方向為智能電網供配電

 您的位置:
您的位置: 在線交流
在線交流